今年も六本木ヒルズでORFがありました。中西研は今年はCityCompiler、夜景星座、MailTraveler の展示を行いました。


{kind=link}
スマートシティとキノコとブッダ 人間中心「ではない」デザインの思考法

UnityとROS 2で実践するロボットプログラミング

社会イノベーションの方法と実践

Processing:ビジュアルデザイナーとアーティストのためのプログラミング入門

アイデアキャンプ

POST-OFFICE
X‐DESIGN

デザイン言語2.0

こんにちは石井です。
「シンキングプロセスデザイン」で勧められていた、紙に思考の過程を書きつつ考える【ビジュアルシンキング】に関連して面白いものを見つけたので紹介します。
“Visual Note Taking / Sketchnotes ” presentation by Eva-Lotta Lamm (from slideshare)
上のリンク先はいろいろな人のプレゼンテーション用スライドが公開されている「slideshare」というサイトにたまたまあった、WebデザイナーのEva-Lotta Lammさんのスライドです。彼女はここで”Visual Note Taking”の面白さについて沢山の例を交えつつ紹介しています。


(Visual Note Takingの例:左=レオナルド・ダ・ダヴィンチによるスケッチ、右=Eva-Lottaさんによるスケッチ)
残念ながらスライドにはメモやスピーチは含まれていないので何となくの雰囲気を感じとるしかできないのですが、まず”Visual Note Taking”とは何かということから始まり、かの有名なダヴィンチのスケッチから最近のスケッチまで様々なノートを紹介しています。どのノートも一癖ある面白いものばかりでそのクオリティには驚かされるばかりです。
Visual Note Takingとはその名のとおり視覚的で直感的に捉えられるノートのとり方なのですが、このプレゼンテーションでは次に具体的なやり方について掲載されています。情報に階層をつけたり同じ要素をブロックでまとめたりするほか、タイムラインの流れに従って書いて情報を整理する方法などを紹介しています。さらに「楽しいのが一番!」と記す彼女は楽しいノートを作るために色をつけたりフレームや矢印の形を変え、文字のフォントまで変えているそうです。
中で紹介されるノートがあまりにも完成度が高いので、思考の過程としてのスケッチではなく思考の結果としてのスケッチになっている気もしますが、彼女のように楽しく工夫して思考や情報を視覚的にアウトプットできれば、それを後から見返すのも楽しくなりそうですね。
このような”Visual Note Taking”のやり方を高校時代にしていたら、毎回寝ていた古典や化学も楽しく勉強できたのかもしれません。
※スケッチの写真をもっと見てみたい方は、Flickrで「Sketchnote」などと検索してみるといろいろ出てくると思います。
こんにちは。秋学期から新研究会に新規参加させていただいております井上と申します。
片倉さん不調のため、一週間の間が空いてしまいましたがご了承を。
前の記事で紹介された「夜景星座」アプリですが今回、私がスプラッシュ画面等々のデザインをさせて頂きました。
こちらです。

アプリの画面を描くのが初めて&パースを取るのが苦手(!)
なので拙い部分がありますが、スタイリッシュな感じは出たかなと思います。
イラストが趣味だったので、こういう所で多少なりお手伝いが出来たのは光栄でした。
次回は大森さんか、同じく新規の石井さんのどちらかが担当です。宜しくお願いいたします。
こんにちは、竹内です。
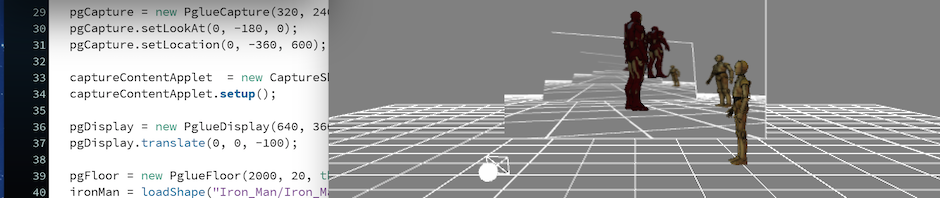
いま中西研のシンボル的存在の西牟田先生(現・藤田研)のアイデアである夜景星座というアプリケーションの実装を行っています。
先人達が光の点に関係性を見いだし、人や動物に例え、ストーリーを作っていったように街の光の点で思い思いの形を描く。それが夜景星座です。「夜景星座」という名前がそもそも素敵ですね。さすがです。
画像が夜景でないだけに、凄まじくアプリケーションの雰囲気が伝わらないと思うのですが、実装が完了したら画像を更新します。
技術的にはそう真新しいことも難しいこともやっていなく、純粋に見せ方が重要になるアプリケーションなので、作っている過程で非常に勉強になります。
リリースもする予定なので乞うご期待!
次は中西研のエース長野くんがブログを書いてくれるのでそれもお楽しみに!
中西研の北原です。
Graffiti Research Lab » L.A.S.E.R. Tag で紹介されているLaser Tagというレーザポインタでプロジェクターが投影している先に落書きが出来るアプリケーションがあります。しかし、このLaserTagが作られてからSnowLeopardにバージョンアップしたり、LaserTagが依存しているOpenFrameworksが大幅に変わるなどでSnowLeopardでカメラを使った最にクラッシュしてしまう問題がありました。
Theodore Watson – Laser Tag 2.0 – How To – Download and Source Code のコメントに紹介されていたSnowLeopardの修正版の挙動も本家と少し違うように感じられたので修正したものを
http://web.sfc.keio.ac.jp/~soh335/download/LaserTag2002SnowLeopard.zip
にアップロードしました。
変更点としては、OpenFrameworksのバージョン、0.61を利用しつつ同胞されてるOpenCVやXMLを扱うアドオンがもとのLaserTagの時と大分変わってしまっているので、0.61で動くように昔のアドオンを変更して利用するというふうにしました。
中西研の関口です。
6月20日に、XDの研究室(+熊坂研)が集まり、フットサル大会を企画、開催しました。
今回は、中西研の他に、脇田研・山中研・坂井研・熊坂研の4チームが参加して下さり、非常に楽しい時間を過ごすことができました。本当にありがとうございます。
さてさて、そのフットサルですが、我が中西研は、日頃の運動不足を露呈してしまいました。


総当たりで試合をした結果、優勝は坂井研でした。商品はありませんが、おめでとうございます。
XD問わず、SFCの研究室の垣根を超えたこういった活動を今後もやっていきたいですね。
次は、フットサルやバスケットボールなどもしていきたいと思います。

(今回の写真は、脇田研の方々に頂きました。ありがとう!)
中西研の関口です。4年生になりました。気づいたら22歳。最近、疲れが抜けません。
さて、L.A.S.E.R. Tagをいじる機会があり、現在、P5用に移植してる真っ最中です。その中で重要な機能であるキャリブレーションの実装について今回はメモ程度に残しておきます。
L.A.S.E.R. Tagでは、読み込んだカメラ画像に対しキャリブレーションを施して正確にポインタと投影面が重なるように設定が可能となっています。これによって、斜めからカメラで落書き面を捉えても、正確に落書きすることが可能となっているんですね。
今回は、これとおんなじようなことを、Processingでやろうというわけです。
多分、L.A.S.E.R. TagではOpenCVを使ってキャリブレーションしてる気がするのですが、ProcessingにはOpenCVのライブラリがあるのですが、キャリブレーションする機能は使えないようだったので、結局頑張って計算することにしました。
そもそも、こういった平面の変換は射影変換と呼ばれていて、任意の4点が定まれば、一意にパラメータが定めることができます。(詳しくは、http://www.teu.ac.jp/clab/kondo/research/cadcgtext/Chap5/Chap503.html)
ということで、キャプチャした画像から任意の4点を選択し、そこからパラメータを計算して表示すればなんとなくOKっぽいです。パラメータの計算は連立方程式をとけば出てきます。

ただ、あんまりProcessingにないライブラリやらを使いたくなかったので、今回はMatrixを使わずに計算することにしました。この際、AS3で同じことをしている人を発見したので、大いにパクリました。というかむしろ、AS3をP5に移植したといって過言ではないです。(参考:Homography | HIDIHO!)
ということで、ソースコードです。
[java]
import JMyron.*;
JMyron jmyron;
PImage capture;
PImage convert;
boolean dragged = false;
int selector = 0;
final static int CAP_WIDTH = 320;
final static int CAP_HEIGHT = 240;
Point[] points = {
new Point(),new Point(),new Point(),new Point()};
void setup(){
size(CAP_WIDTH*3,CAP_HEIGHT);
jmyron = new JMyron();
jmyron.start(CAP_WIDTH,CAP_HEIGHT);
capture = new PImage(CAP_WIDTH,CAP_HEIGHT);
convert = new PImage(CAP_WIDTH,CAP_HEIGHT);
points[0].setPoint(0,0);
points[1].setPoint(320,0);
points[2].setPoint(320,240);
points[3].setPoint(0,240);
}
void mousePressed(){
if(dragged == false){
for(int i=0; i < 4; i++){
if(points[i].x -10 < mouseX && points[i].x + 10>mouseX){
if(points[i].y -10 < mouseY && points[i].y + 10>mouseY){
dragged = true;
selector = i;
}
}
}
}
}
void mouseDragged(){
if(dragged){
if(mouseX > 0 && mouseX < CAP_WIDTH){
points[selector].setPoint(mouseX,points[selector].y);
}
if(mouseY > 0 && mouseY < CAP_HEIGHT){
points[selector].setPoint(points[selector].x,mouseY);
}
}
}
void mouseReleased(){
dragged = false;
}
void draw(){
jmyron.update();
int[] jImage = jmyron.image();
capture.loadPixels();
for(int i=0;i < capture.width*capture.height; i++){
capture.pixels[i] = jImage[i];
}
capture.updatePixels();
image(capture,0,0);
ellipseMode(CENTER);
noFill();
strokeWeight(1);
for(int i=0; i < 4; i++){
stroke(255*(i%2),64*(i%4),0);
ellipse(points[i].x,points[i].y,10,10);
line(points[i%4].x,points[i%4].y,points[(i+1)%4].x,points[(i+1)%4].y);
}
convert = setTransform(capture,CAP_WIDTH,CAP_HEIGHT,points[0],points[1],points[2],points[3]);
image(convert,CAP_WIDTH,0);
}
PImage setTransform(PImage pimg,
int destWidth, int destHeight,
Point p0, Point p1,
Point p2, Point p3){
if ( p0 == null || p1 == null || p2 == null || p3 == null ) return null;
float[] system = new float[8];
system = getSystem(p0,p1,p2,p3);
PImage target = new PImage(destWidth,destHeight);
int i,j,x,y,u,v;
Point p;
for(i = 0; i
processingのcaptureを使えばいいんですが、ちょっと都合上JMyronを使わせて頂きました。と言っても、Captureでも特に問題はありません。その場合は、captureをPImageからCaptureに変えればすんなり動く気がします。
実行結果はこんな感じです。
このように、ポスターが長方形ぴったりに収まるように表示されるようになりました。
これで、カメラの位置に関係なく色々することができますね!
それでわ。